
This laboratory is dedicated to advancing the capabilities of robot agents in seamlessly executing object transportation tasks within human-centric environments such as homes and retail spaces. It provides a versatile platform for exploring and refining generalized robot plans that manage the movement of diverse objects across varied settings for multiple purposes. By focusing on the adaptability and scalability of robotic programming, the lab aims to enhance the understanding and application of robotics in everyday contexts ultimately improving their generalizability, transferability, and effectiveness in real-world scenarios.
In the laboratory, you are equipped with a generalized open-source robotic plan capable of executing various object transportation-related tasks, including both table setting and cleaning, across diverse domestic settings. These settings range from entire apartments to kitchen environments and the plan is adaptable to various robots. You can customize the execution by selecting the appropriate environment, task, and robot, and then run it within a software container.
“The EASE household challenge is subject of the IEEE spectrum article ‘It’s (Still) Really Hard for Robots to Autonomously Do Household Chores’” by Evan Ackerman (IEEE Spectrum, 17.06.2021)
Description
Every time we think that we are getting a little bit closer to a household robot, new research comes out showing just how far we have to go. Certainly, we have seen a lot of progress in specific areas like grasping and semantic understanding etc., but putting it all together into a hardware platform that can actually do things autonomously still seems to be a long way to go.
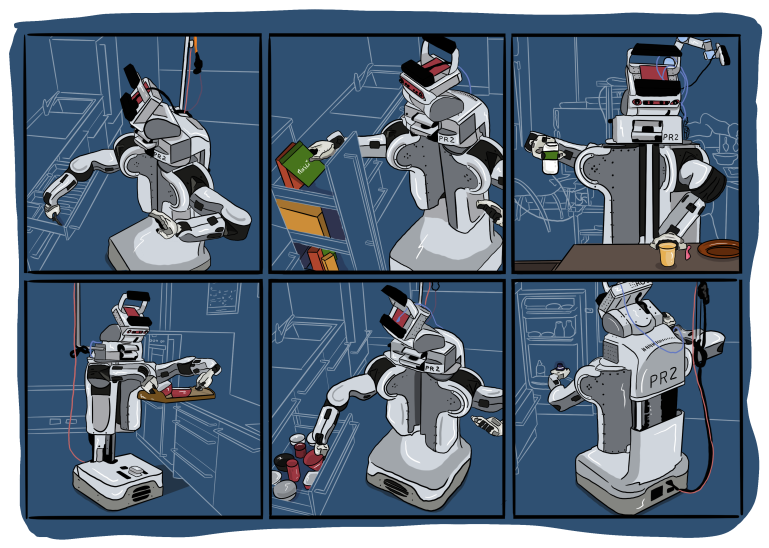
In a paper presented at ICRA 2021, researchers from the University of Bremen conducted a “Robot Household Marathon Experiment,” where a PR2 robot was tasked with first setting a table for a simple breakfast and then cleaning up afterwards in order to “investigate and evaluate the scalability and the robustness aspects of mobile manipulation.” While this may seem like something robots should have figured out, you might not be surprised to learn that it is actually still a significant challenge.
Example Videos
Publications
Authors


Software Components
CRAM

is a software toolbox for the implementation of autonomous robots.
 source code
source codeKnowRob
is a knowledge processing system for robots.
source codeOpenEASE
is a web-based knowledge service providing robot and human activity data.
source codeGISKARD

is a framework for constraint- and optimization-based robot motion and planning control.
source codeROBOKUDO

is a perception framework targeted for robot manipulation tasks.
source codePyCRAM

is the Python 3 re-implementation of CRAM. PyCRAM is a toolbox for designing, implementing and deploying software on autonomous robots.
source code
Courses and/or Turorial
Courses:
Integrated Intelligent Systems
This lecture covers contemporary techniques of AI in cognitive robotics.
Robot Programming with ROS
Getting into the Robot Operating System ROS is a steptone for future roboticists.
SUTURO - sudo tidy-up-my-room
Students in this project design their own application to run on a real robot.
Tutorials:
CRAM Plan Executive
Check out the online hands-on tutorials on the CRAM plan executive.
