
This laboratory focuses on advancing robotic capabilities in performing core actions such as cutting, mixing, pouring, and transporting within dynamic, human-centered environments like homes.


 “The EASE household challenge is subject of the IEEE spectrum article ‘It’s (Still) Really Hard for Robots to Autonomously Do Household Chores’” by Evan Ackerman (IEEE Spectrum, 17.06.2021)
“The EASE household challenge is subject of the IEEE spectrum article ‘It’s (Still) Really Hard for Robots to Autonomously Do Household Chores’” by Evan Ackerman (IEEE Spectrum, 17.06.2021)
Description
Every time we think that we are getting a little bit closer to a household robot, new research comes out showing just how far we have to go. Certainly, we have seen a lot of progress in specific areas like grasping and semantic understanding etc., but putting it all together into a hardware platform that can actually do things autonomously still seems to be a long way to go.
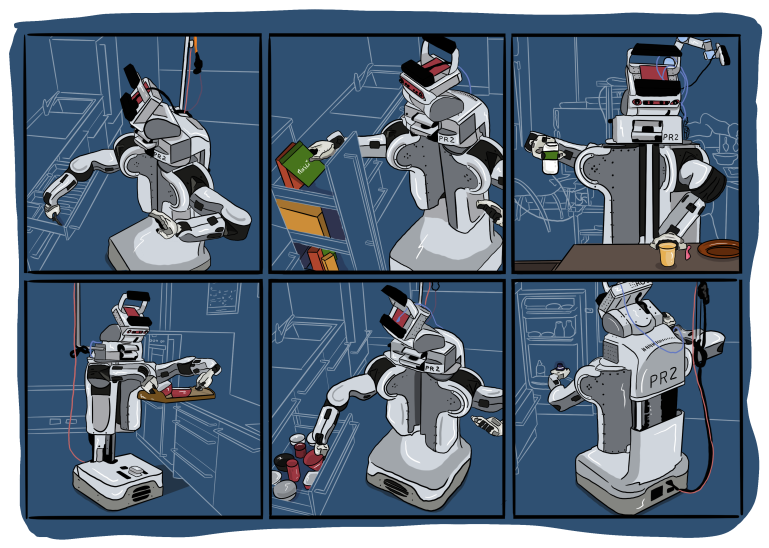
In a paper presented at ICRA 2021, researchers from the University of Bremen conducted a “Robot Household Marathon Experiment,” where a PR2 robot was tasked with first setting a table for a simple breakfast and then cleaning up afterwards in order to “investigate and evaluate the scalability and the robustness aspects of mobile manipulation.” While this may seem like something robots should have figured out, you might not be surprised to learn that it is actually still a significant challenge.
